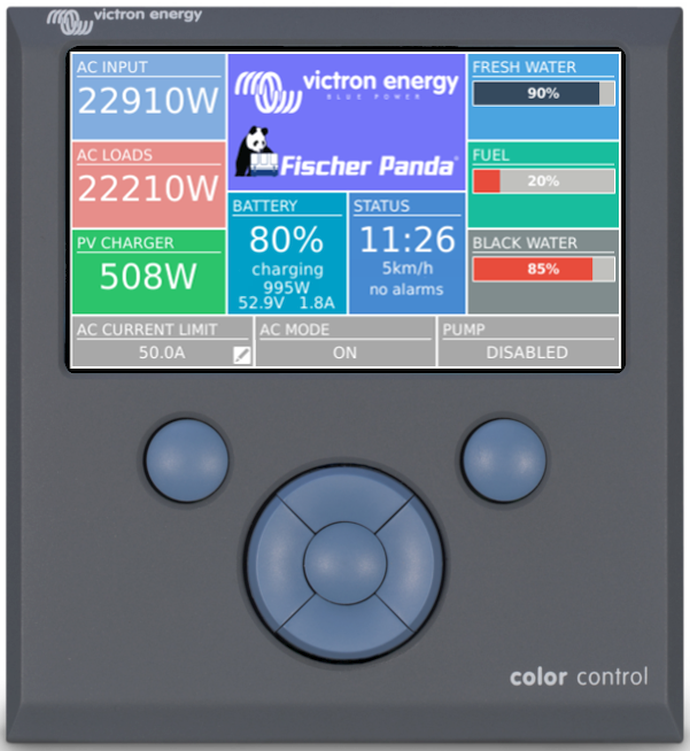
This release is primarily the result of the Marine Alliance with Fischer Panda, as this new version adds monitoring and control of Fischer Panda generators, and several other improvements.
Let’s start with explaining more about the Fischer Panda integration:
Fischer Panda generator integration
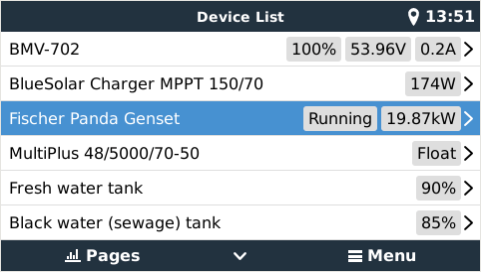
The generator needs to be connected to the VE.Can port of the CCGX, which requires the Fischer Panda CAN module SAE J1939, part number 0006107. Once all wiring and setup has been correctly done, the Fischer Panda shows up in the device list:
Entering that menu shows the details, like this:
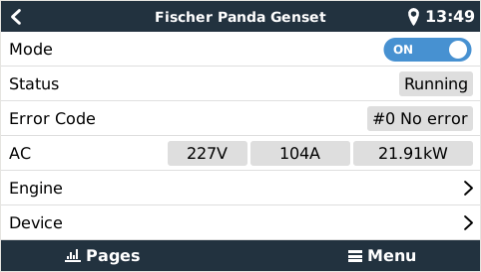
It features an on/off switch, as well as the status and the main AC parameters: voltage, current and power. Temperature, RPM and other details are available in the Engine sub menu.
Besides manual start/stop and monitoring, there is also an automatic start/stop menu. Which has the same wide range of options as the Generator start/stop mechanism that has been available with the relay.
New: Generator has not started alarm
The auto generator start/stop function has been extended with an alarm feature. After starting the generator, it still monitor the Multi (or Quattro), to see if it connects to the generator. In case it does not it will cause an alarm.
Which catches a wide array of possible problems, like a simple no fuel situation, but also a tripped fuse or other problem between the generator and the Quattro.
Enable the ‘Detect generator at AC input’ setting in the Generator start/stop settings.
More changes:
- Add new Lynx Ion BMS
- Add user option to clear historic values for Lynx Ion + Shunt fw v2.00 and onwards
- Improve canbus port selection. There are now four profiles to choose from:Existing CAN bus service settings are converted to the matching profile during the upgrade.

- Add Phoenix VE.Direct Inverters (logging to VRM Portal, ModbusTCP)
- Fix Remote Console not working now and then. A reboot used to fix that. Those reboots are no longer necessary.
- Improve VRM Portal logging security: add https which is a more secure transport protocol than http. Note that transmitting the data over https increase data usage. The https feature is not enabled by default on already installed systems, you have to manually enable it. It will be enabled by default for newly shipping units, later, once our stock has turned over.
- Device authentication: enabling https also enables device authentication: the CCGX, and Venus GX, authenticate itself against the VRM Portal.
ESS Improvements
- Add grid-setpoint parameter.
- Change default grid-setpoint parameter from 0W to 50W
- Add ‘Inverter AC output in use” setting. Default enabled. Setting this to Disabled hides the AC-out box from the graphical overview; Use this in systems where there is nothing connected to the output of the Multi or Quattro, which is typical for certain grid-parallel systems in Western Europe.
- Bug fix: power from solar charger not fed back to grid if Minimum Discharge SOC is set to 100% and battery SOC is 100%.
- Bug fix: unable to fully discharge BMZ battery
- Bug fix: fix unexpected battery charge on low SoC. This bug occurs on systems with a multiple phase grid meter, and a single Multi/Quattro where the phase compensation setting is disabled. If the battery SoC is below the minimum SoC, the Multi/Quattro would be ordered to charge if there are loads on the phases not connected to the Multi (which are measured by the grid meter).
Other changes
- ModbusTCP: Add Phoenix Inverter VE.Direct range
- ModbusTCP: Change unitid for a Lynx Ion and Lynx Ion + Shunt: use Unit-ID 1 for all battery registers < 1200, instead of Unit-ID 0.
- ModbusTCP: Add second register for ESS setpoint, with a different scale factor, allowing setpoints > 32kW
- Improved naming of CAN-bus BMS batteries (also look at canbus message 0x35E)
- Always show CAN-bus BMS firmware version when sent by the battery
- Improve handling around the SD card ejects and inserts
- Move MPPT parallel states to a submenu, reducing the clutter
Have a good day!
Matthijs Vader















 #victronenergy #adventure
#victronenergy #adventure
 ELECTRICS
ELECTRICS 
