Un parc de batteries redondantes en parallèle peut être créé en combinant plusieurs unités Lynx Smart BMS et Lynx Smart BMS NG avec leurs parcs de batteries associés. Cette fonctionnalité innovante améliore considérablement les systèmes de batteries au lithium en augmentant la capacité maximale de stockage d’énergie et en prenant en charge des courants plus élevés. Mais surtout, elle introduit la redondance, garantissant que le système reste opérationnel même en cas de défaillance d’un parc de batteries. Cette redondance est cruciale pour maintenir une alimentation électrique et un fonctionnement continus.
Fonctions clé
Capacité accrue et redondance : en raccordant les parcs de batteries en parallèle, le système peut gérer des courants plus élevés et rester opérationnel même si un parc de batteries tombe en panne.
Compatibilité étendue : dans ces configurations, les unités Lynx Smart BMS analogiques peuvent être combinées avec les unités Lynx Smart BMS NG, permettant ainsi des systèmes intégrant des parcs de batteries avec des batteries Lithium Smart et Lithium NG. Cependant, seules les unités Lynx Smart BMS ayant le même courant nominal peuvent être utilisées en parallèle (par exemple, 500 A + 500 A ou 1 000 A + 1 000 A, mais pas 500 A + 1 000 A).
Gestion automatique des erreurs : si un parc de batteries rencontre une erreur, celui-ci se déconnecte tandis que les autres parcs de batteries continuent de fonctionner normalement. Cela garantit une alimentation électrique continue et réduit le risque d’arrêt du système.
Surveillance améliorée : le système fournit une vue détaillée de tous les parcs de batteries connectés et déconnectés dans la liste des dispositifs GX, permettant ainsi une surveillance et un diagnostic complets.
Reconnexion transparente : lorsqu’un BMS déconnecté est prêt à se reconnecter, il le fait en toute sécurité sans provoquer de surtensions de courant importantes.
Intégration automatique de nouveaux parcs de batteries : aucune configuration n’est nécessaire.
Comment ça marche ?
Si le dispositif GX détecte plusieurs parcs de batteries avec la même instance VE.Can, il les traite comme des BMS tous connectés au même bus CC.
Lorsque deux BMS ou plus sont connectés, ils forment un système de batterie « virtuel » qui apparaît comme un dispositif unique supplémentaire dans la liste des dispositifs GX. Ce système de batterie virtuel agit comme un parc de batteries standard avec toutes ses fonctions, de la même manière qu’un parc de batteries physique. Le DVCC sélectionnera automatiquement ce parc de batteries.
Lors de la connexion d’un BMS à un système déjà en fonctionnement, la différence de tension acceptable avant la fermeture du contacteur dépend de la capacité des parcs de batteries déjà en ligne ; plus la capacité est élevée, plus la différence de tension admissible est faible. Le nouveau parc de batteries ne sera connecté que lorsque la différence se situera dans les limites acceptables.
Les états des contacts ATC/ATD et ATC de l’alternateur sont synchronisés.
En cas de faible tension d’une cellule dans l’un des parcs de batteries, le BMS associé ouvre immédiatement son contacteur (après quelques secondes) au lieu de passer par la séquence de délai normale pour empêcher une décharge supplémentaire inutile du stockage de la batterie. Tous les autres BMS restent opérationnels.
Cette section énumère les exigences et les limites de l’exploitation d’un système de batteries avec plusieurs Lynx Smart BMS.
Configuration requise :
Chaque Lynx Smart BMS du système nécessite au moins le micrologiciel v1.11.
Un dispositif GX avec le micrologiciel 3.40 ou une version ultérieure.
Limitations :
Seules les unités Lynx Smart BMS ayant le même courant nominal peuvent être utilisées en parallèle (par exemple, 500 A + 500 A ou 1 000 A + 1 000 A, mais pas 500 A + 1 000 A). Les unités analogiques Lynx Smart BMS peuvent être mélangées avec les unités Lynx Smart BMS NG.
Pour les systèmes avec plusieurs unités Lynx Smart BMS connectées au même réseau VE.Can mais ne faisant pas partie d’un parc de batteries redondant parallèle, utilisez le dispositif GX et allez dans Paramètres → Services → [port VE.Can correspondant] pour attribuer à chaque unité une instance VE.Can unique. Le dispositif GX traite les BMS ayant la même instance VE.Can comme faisant partie du parc de batteries virtuel nouvellement créé.
La limite de courant globale est toujours la somme des limites des BMS actifs. Lorsqu’un BMS se déconnecte en raison d’une erreur, la capacité totale de gestion du courant du système diminue en conséquence
Les connexions du BMS et du distributeur sur le Lynx Smart BMS sont locales au parc de batteries et peuvent être câblées comme d’ordinaire.
Cependant, il y a quelques particularités à prendre en compte lors de l’installation. À savoir :
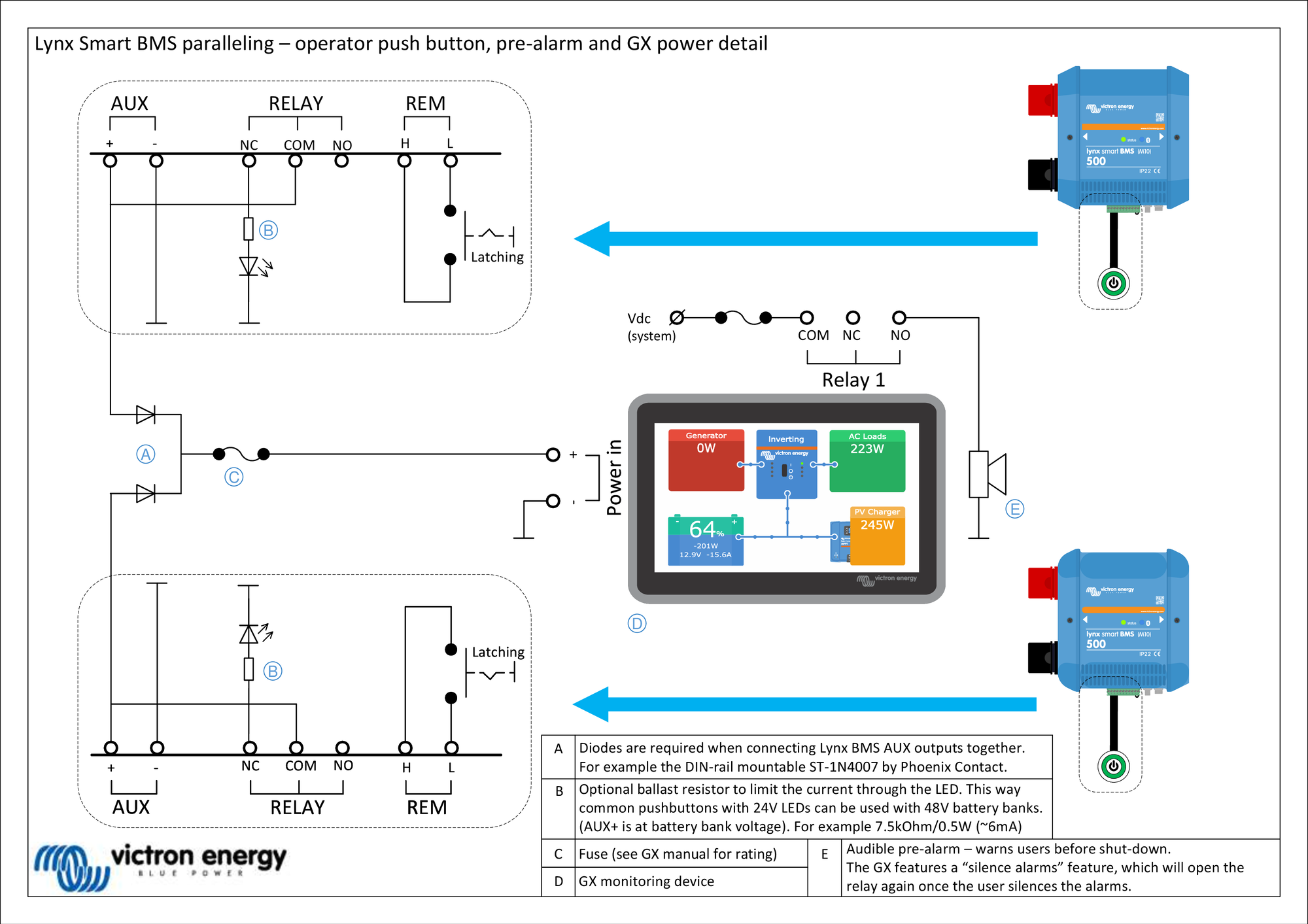
Pour assurer une alimentation continue du dispositif GX, câblez les ports AUX de tous les BMS en parallèle. Cette configuration garantit que le dispositif GX reste alimenté si un BMS est arrêté ou mis hors tension pour la maintenance. Une diode de blocage est nécessaire pour chaque sortie AUX. Pour plus de détails, consultez les schémas suivants.
Nous recommandons de connecter un bouton-poussoir à verrouillage (de préférence avec une LED) aux bornes d’allumage/arrêt à distance respectives des BMS, au lieu du cavalier installée en usine. Cela permet d’activer/désactiver facilement chaque groupe de batteries individuellement. Pour plus de détails, veuillez consulter les schémas suivants.
Nous recommandons également l’installation d’une alarme sonore, telle qu’un avertisseur externe, connecté au relais 1 du dispositif GX. Lorsque le relais 1 est configuré comme relais d’alarme, l’avertisseur sonore se déclenche en cas de situation d’alarme. Cette alarme peut être acquittée directement sur le dispositif GX, ce qui arrêtera le son de l’alarme. Le relais d’alarme peut également être câblé pour s’intégrer au système d’alarme d’un bateau.
Si les contacts ATC sont nécessaires, connectez tous les contacts ATC en parallèle. Les BMS suivent l’état ATC de chacun d’entre eux. Si un BMS désactive l’ATC, les autres font de même.
Si le contact ATD est nécessaire, câblez tous les contacts ATD en parallèle afin que les consommateurs restent opérationnels si au moins un BMS est sous tension.
Si un ATC de l’alternateur est requis, câblez tous les contacts de relais en parallèle. Tant qu’au moins un parc de batteries est connecté, l’alternateur peut fonctionner.
Le schéma suivant illustre deux unités Lynx Smart BMS NG, chacune gérant son propre parc de batteries, connectées en parallèle. Le schéma suivant fournit une vue détaillée de la configuration du câblage, y compris les boutons-poussoirs à verrouillage avec LED intégrées, l’emplacement des diodes de blocage au cas où la sortie AUX devrait être câblée en parallèle, et la connexion d’une alarme sonore au relais 1 sur le dispositif GX. Notez que la plupart des boutons avec LED intégrées sont conçus pour une tension de commande de LED de 12 ou 24 V. Lorsqu’ils sont utilisés dans un système basé sur un parc de batteries de 48 V, une résistance de ballast supplémentaire est nécessaire, comme indiqué dans la légende du schéma sous « B ».

Les BMS individuels sont surveillés et contrôlés comme un seul BMS via le dispositif GX ou VictronConnect, tandis que le BMS virtuel ne peut être surveillé qu’à partir du dispositif GX. Si le dispositif GX dispose d’une connexion Internet, les paramètres des différents BMS et du BMS virtuel sont également envoyés au portail VRM pour y être surveillés.
Le BMS virtuel est contrôlé automatiquement, tandis que les BMS individuels peuvent être contrôlés manuellement (marche, veille, arrêt). Il est également possible d’attribuer un nom individuel via le menu Appareil. |  |
Le contrôleur de batterie sur le portail VRM affiche toujours les valeurs combinées sur le tableau de bord VRM. Tous les paramètres du BMS sont disponibles via des widgets dans le menu Avancé du portail VRM. |  |
Lorsqu’un BMS est mis sous tension, il vérifie la différence de tension entre la batterie en ligne et la batterie nouvellement ajoutée. Il reste dans l’état « en attente » jusqu’à ce que la différence de tension soit suffisamment faible pour fermer le contacteur en toute sécurité. Cet état est affiché dans la liste des appareils pour le BMS concerné. Lorsqu’un BMS est dans cet état, un champ « tension système » apparaît également sur sa page d’appareil, affichant la tension du BMS parallèle. |  |
Le tableau présente les paramètres des différents BMS et décrit la méthode de calcul et d’affichage des valeurs combinées pour le BMS virtuel.
Paramètre | Résultat combiné dans le BMS virtuel |
|---|---|
Limite de tension de charge (CVL) | CVL le plus bas des BMS en fonction de l’état de l’appareil (bulk, absorption et float) |
Limite de courant de charge (CCL) | Somme de tous les CCL |
Limite de courant de décharge (DCL) | Somme de tous les DCL |
État de charge (SoC) | Moyenne de l’état de charge pondérée par la part de capacité |
Capacité (Ah) | Somme |
Autonomie restante (TTG) | Moyenne des BMS |
Tension de la batterie | Moyenne |
Courant de la batterie | Somme |
Puissance de batterie | Somme |
Température de la batterie | Maximum |
Cette section répond aux questions les plus courantes afin de vous aider à mieux comprendre et utiliser la fonction de BMS parallèle. Si vous cherchez à résoudre un problème, si vous avez besoin d’éclaircissements sur certaines fonctions ou si vous cherchez des conseils pour optimiser votre expérience, vous trouverez ici des réponses utiles. Si vous ne trouvez pas de réponse à votre question, reportez-vous aux sections détaillées de ce manuel.
Q : Que se passe-t-il lorsque j’ai deux parcs, le premier complètement chargé et le second vide, et que j’active les deux BMS simultanément ?
R : Les deux BMS commenceront la précharge. Celui qui est vide terminera la précharge en premier et se connectera ensuite. Le second BMS passera en mode d’attente et attendra que la différence de tension soit dans les limites ; en d’autres termes, il attendra que le premier parc soit chargé à une tension similaire.
Q : Que se passe-t-il lorsqu’un parc est entièrement chargé et en ligne et que j’active le deuxième parc, qui est vide ?
R : Le second parc passe en mode veille et attend que la différence de tension soit dans les limites, c’est-à-dire que le(s) parc(s) en ligne se décharge(nt) à une tension suffisamment basse.
Q : Que se passe-t-il dans l’autre sens, lorsqu’un parc vide est en ligne et qu’un parc plein est ajouté ?
R : Le parc complet passera en mode d’attente jusqu’à ce que la limite de tension soit respectée, c’est-à-dire jusqu’à ce que le parc vide soit chargé.
Q : Que se passe-t-il en cas de perte de communication entre les BMS ?
R : Cela dépend de l’endroit où la connexion est interrompue dans la chaîne des BMS. Imaginons un système avec deux parcs de batteries, comme l’illustre l’image ci-dessous :
Événement | Comportement | |
|---|---|---|
Le câble A est déconnecté ou rompu | BMS 1 : le BMS émet un avertissement indiquant que la connexion CAN est perdue et continue à fonctionner en tant que BMS autonome. BMS 2 : continue à fonctionner en tant que BMS autonome tout en maintenant la communication, y compris le DVCC, avec le dispositif GX. BMS virtuel : reste présent sur le dispositif GX et indique qu’un seul des deux BMS est connecté. |  |
Le câble B est déconnecté ou rompu | BMS 1 : continue à fonctionner en parallèle alors que la communication avec le dispositif GX est interrompue. BMS 2 : continue à fonctionner en parallèle alors que la communication avec le dispositif GX est interrompue. Pour les deux BMS : le DVCC ne fonctionne pas car aucun des deux BMS ne peut communiquer avec le dispositif GX. Par conséquent, l’algorithme de charge défini dans le(s) chargeur(s) est maintenant appliqué. BMS virtuel : disparaît de la liste des appareils | |
Erreur dans le parc de batteries 1 ou 2 | BMS : le BMS met hors tension le parc de batteries défectueux tandis que les autres BMS continuent de fonctionner comme des BMS autonomes. Les paramètres du DVCC (CCL, CVL et DCL) sont basés sur la batterie du BMS qui est toujours active. | |
Panne d’alimentation sur un BMS | BMS : le BMS défectueux s’éteint tandis que les autres BMS continuent à fonctionner comme des BMS autonomes. Les paramètres du DVCC (CCL, CVL et DCL) sont basés sur la batterie du BMS qui est toujours active. |
Q : Que se passe-t-il si une erreur se produit dans l’un des parcs de batteries ?
R : Voir le tableau ci-dessus.
Q : Que se passe-t-il en cas de panne d’alimentation sur l’un des BMS ?
R : Voir le tableau ci-dessus.
Q : Comment le circuit de précharge gère-t-il la différence de tension lors de la connexion à un système déjà en fonctionnement ?
R : Lorsqu’il est connecté à un système déjà en fonctionnement, la différence de tension acceptée avant la fermeture du contacteur dépend de la capacité détectée des parcs de batteries déjà en ligne.
Q : Comment les états des contacts ATC, ATD et ATC de l’alternateur sont-ils gérés par plusieurs BMS ?
R : Les états des contacts ATC, ATD et ATC de l’alternateur sont synchronisés entre tous les BMS.
Q : Que se passe-t-il si la tension d’une cellule est trop basse dans l’un des parcs de batteries ?
R : Si la tension d’une cellule tombe trop bas, le BMS concerné ouvre son contacteur après un délai de quelques secondes pour empêcher une décharge supplémentaire, tandis que les autres BMS restent en ligne.